专利推介| 一种变刚度软体抓手及其控制方法和机械臂
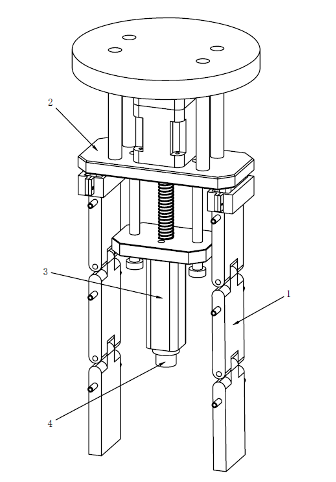
专利示意图
一、技术领域
磁控机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:ZL 202311087800.7
授权公告日:2023年9月27日
发明人:曲钧天、李振坤、郝宏伟、方毅
2.专利说明书摘要
本发明属于机械抓手领域,公开一种变刚度软体抓手,尤其是一种基于磁流变液的液压软体抓手。该抓手包括支撑装置2以及与支撑装置连接的抓手装置1和推杆装置3,其中:抓手装置由两根或多根手指并排形成,每一根手指由末端手指单元,中间手指单元,首端手指单元串联形成。手指单元内部填充磁流变液,液压驱动达到弯曲效果,施加磁场时,手指单元刚度变化,起到变刚度包覆效果。驱动电机,带动推杆装置沿竖直方向移动,到达相应位置时,电磁铁通电,指定手指单元弯曲,实现抓取动作。该软体抓手响应速度快、灵活性高,适应于不同形状物体的抓取。
3.创新点
(1)本发明提供了一种根据磁流变原理的变刚度软体抓手及其控制方法和机械臂,该抓手包括支撑装置以及与支撑装置连接的抓手装置和末端设置电磁铁的推杆装置,不同于现有变刚度软体抓手,该抓手响应速度快、灵活性高;
(2)本发明装置是一种根据磁流变原理的变刚度软体抓手及其控制方法和机械臂,其手指单元内部填充磁流变液,外部由软体材料组成,有良好的抓取柔性,可以自适应包络各种形状的物体,同时不易损伤物体表面;多节手指单元串联连接,独立液压控制,实现类似于人手的灵活度和多模态。
4.痛点问题
本发明为解决目前磁流变软抓手抓取范围小、灵活度低的问题,同时大多数目前提出的磁流变抓手并没有相应的外界磁场控制装置,提出了一种基于磁流变弹性体和磁流变液的变刚度软体抓手。
5.技术优势
(1)本发明提供一种变刚度液压软体抓手,其手指单元内部填充磁流变液,外部由软体材料组成,有良好的抓取柔性,可以自适应包络各种形状的物体,同时不易损伤物体表面;多节手指单元串联连接,独立液压控制,实现类似于人手的灵活度和多模态;同时由于磁流变液的良好物理性质,响应迅速,无需安装传感器,就可以适应复杂的外界环境。
(2)本发明还提供了变刚度液压软体抓手的结构及对其进一步优化,对于其中的推杆装置,给出了两种不同结构的解决方案。在优点1的基础上进一步给出了控制外部磁场的方法,通过控制电机直接控制每一个手指单元的弯曲,方便整个手指的多模态姿势和抓取动作。
三、产业化信息
1.应用场景
(1)现有版本的机器人可以用于⼯业领域,如解决柔性易损物品搬运难题;
(2)机器人进一步结合先进传感和控制技术,可以用于水下复杂狭小空间的抓取;
2.商业价值
此项技术拥有巨大的商业前景,对于机器人行业有以下市场价值:
(1)本变刚度软体抓手驱动方式简单,抓取范围广,效果好,且本体由磁流变材料和常用金属制成,成本低廉;
(2)本变刚度软体抓手能够在⻝品⽣鲜、3C电⼦、 汽⻋零配件等多⾏业对异形易损物品进⾏综合包装分拣环节的抓取难题;
(3)本变刚度软体抓手能够解决水下复杂狭小空间抓取这一常见问题,受众群体广泛,具有较大的市场;
(4)本变刚度软体抓手有望与先进传感、控制技术结合,进一步开发能够应用于多场景的狭小空间作业抓手。
3.发展规划
(1)本项目可以与机器人公司合作,开发新一代基于柔性材料的变刚度软体抓手;
(2)本机器人融合先进智能传感、控制技术,可以⻝品⽣鲜、3C电⼦、 汽⻋零配件等多⾏业对异形易损物品进⾏综合包装分拣环节的抓取难题,也可以应用于其他狭小空间可的特定作业,应用场景从工业抓取领域拓展至更为广阔的其他场景。
4.合作方式
面议
注:所有专利信息未经授权,请勿转载
联系方式:juntian.qu@sz.tsinghua.edu.cn
