专利推介| 一种基于CPG模型的软体仿生机器鱼游动优化方法
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:ZL 202310396666.2
授权公告日:2023年9月22日
发明人:曲钧天、王云飞
2.专利说明书摘要
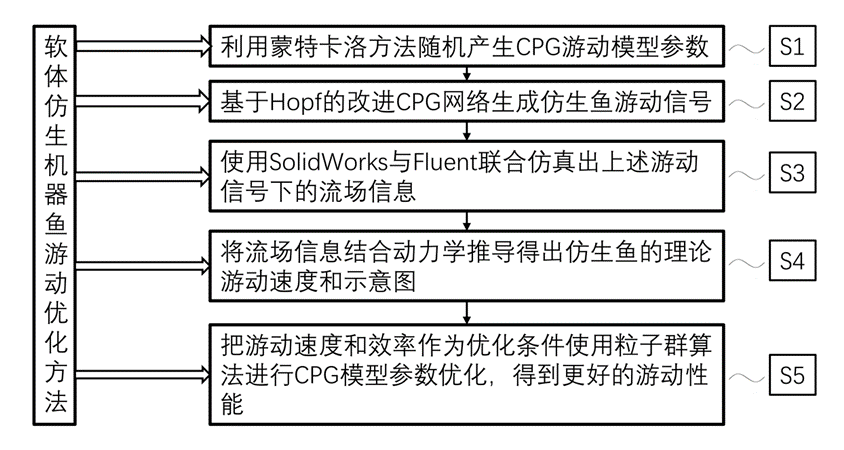
本发明公开了一种基于CPG模型的软体仿生机器鱼游动优化方法,包括:建立基于Hopf模型的中央模式生成器CPG控制网络;通过蒙特卡洛方法随机产生CPG网络模型参数,得到初始状态;将初始状态的游动参数代入基于Hopf的改进CPG网络产生游动信号;将SolidWorks中仿生软体机器鱼的模型代入ANSYS Workbench并导入所述游动信号进行有限元流场仿真;结合流场仿真结果建立拉格朗日方程做软体仿生机器鱼动力学分析,得到其理论游动速度和位置示意图;将游动速度作为优化目标,通过粒子群算法迭代计算出最优控制参数并实验对照;本发明的软体仿生机器鱼结合改进的CPG模型,构建专用于软体仿生机器鱼的游动优化方法,充分利用软体仿生机器鱼游动灵活、仿生性好、推进效率高的特点,达成更好的游动效果。
3.创新点
(1)本发明装置中的软体仿生机器鱼的外壳由硅胶混合浇筑并用烘干机在适当温度下烘干制成,相比于已有的刚性仿生机器鱼,软硅胶材料具有良好的柔顺性和防水性,能够紧密贴合骨架且流线型的鱼体可以减少水中游动的阻力,很大程度上还原了真实鱼类的游动形态;
(2)本发明使用了基于Hopf的改进型CPG网络,在已有的Hopf模型上增加了预处理层
(3)本发明中的软体仿生机器鱼由于其外壳自由度高,难以使用单一数学公式进行模拟,在ANSYS Workbench软件利用有限元仿真鱼体摆动时的流场变化最为准确,因此导入软体仿生机器鱼SolidWorks的设计模型和每次迭代计算得到的CPG游动模型,可以最准确的仿真出流场与鱼体的相互作用,并将其代入拉格朗日动力学方程进行水动力学分析获得理论游动速度和位置示意图,该方法利用流场有限元仿真代替“二维波动板理论”得到的流体力,包括附加质量力、粘滞阻力等,用于仿生机器鱼游动仿真精度更高,更具参考价值。
4.痛点问题
(1)传统刚性水下机器人在水下复杂环境中运动自由度受限,操作困难,很难适合特定场景下的水下作业;
(2)现有的软体水下机器人多为人工肌肉或气动驱动,所能够应用的场景受到能源输入端的限制,从实验室到实用场景的适应性仍有很大的提升空间;
(3)现有的水下机器人多采用有缆通信和供能,所探测区域受到缆绳长度的限制,在水下深度较深时,小型机器人的无线通信和电池功能将发挥更大的作用。
5.技术优势
(1)水下软体机器人具有噪声较小,不易被检测或干扰水下生态系统;
(2)适应不同的水下环境,包括复杂、狭窄或危险的地形;
(3)不同于现有水下机器人运动自由度低和难以密封防水,柔性机器人硅胶材料疏水易密封,运动自由度高;
(4)基于CPG方法的水下机器人控制方法具有较好的自稳定性和可移植性,可以用在传统刚性机器人和新型软体机器人控制上。
三、产业化信息
1.应用场景
(1)环境复杂狭小空间的探测,软体机器人可以发挥灵活性高的特点;
(2)软体机器人进一步结合先进电池储能和自身防水特性,可以在深度水域进行自主作业。
2.商业价值
此项技术拥有巨大的商业前景,对于机器人行业有以下市场价值:
(1)本水下软体机器人驱动方式简单且稳定,摆脱了传统刚性机器人的低自由度,且本体由硅胶材料制成,成本低廉;
(2)本水下软体机器人环境友好性和生物兼容性高,避免产生大量的环境破坏;
(3)本机器人能够解决水下探测问题,受众群体广泛,具有较大的市场;
(4)本水下软体机器人有望与先进传感技术结合,进一步定制开发能够应用于多场景的狭小空间作业柔性机器人。
3.发展规划
(1)本项目可以与机器人公司合作,利用已有制备方法和控制技术,开发新型针对特定应用场景的作业机器人;
(2)本机器人融合先进智能传感技术,可以应用于其他复杂环境下的探测、搜救等工作。
4.合作方式
面议
注:所有专利信息未经授权,请勿转载
联系方式:juntian.qu@sz.tsinghua.edu.cn
