专利推介| 一种柔性管道机器人
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
2.专利说明书摘要
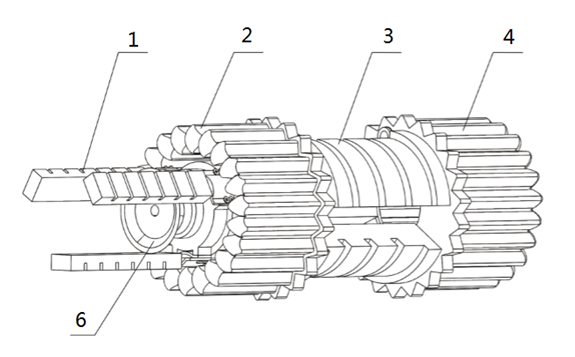
本发明公开了一种柔性管道机器人,包括软手指模块、前足模块、主干模块、后足模块、和连接模块;主干模块的前端和后端分别连接前足模块和后足模块;软手指模块和前足模块安装在连接模块上;主干模块包括至少三个绕轴心间隔分布的气腔,通过给气腔加正压或负压,主干模块具有伸长或缩短的状态,通过给部分气腔加正压,主干模块具有弯曲的状态;前足模块包括前足气腔,通过给前足气腔加正压,前足模块具有直径变大的状态;后足模块包括后足气腔,通过给后足气腔加正压,后足模块具有直径变大的状态;软手指模块包括至少三个软手指,通过给软手指加正压,软手指具有向轴心处弯曲的状态以用于抓取管道内的物体。本发明能够更加彻底地疏通堵塞的管道。
3.创新点
(1)本发明提供了一种能够疏通堵塞管道的柔性管道机器人,机器人能够在管道内部抓取堵塞物并将其运输出管道,不同于现有柔性管道机器人的前顶式疏通方式,能够更加彻底地疏通堵塞的管道;
(2)本发明装置是一种仿蚯蚓蠕动式气动柔性管道机器人,通过主干部分、前足模块和后足模块的配合,机器人能够实现前进、后退、转弯的运动模态;
(3)本发明装置还能够自适应不同管道内径,前足模块和后足模块采用环形的风琴式折纸结构设计,前加压膨胀后外圈直径能够实现大范围的变化,结构简单,对于具有不同内径的管道的适应性好。
4.痛点问题
(1)传统刚性管道机器人采用电机驱动,机械结构复杂笨重,制作和维护成本高;
(2)现有的柔性管道机器人所能够适应的管道内径受到足部膨胀收缩范围的限制,适应性仍有很大的提升空间;
(3)现有的柔性管道机器人前顶式疏通方式需要机器人对堵塞物产生足够大的压力,而且没有从根本上消除管道内部的堵塞物,容易造成二次堵塞。
5.技术优势
(1)柔性机器人具有结构紧凑、成本低廉、制作方便、质量轻便等优点;
(2)基于风琴式折纸机构的足部能够实现更大范围形变,对于不同内径管道的适应能力强;
(3)不同于现有前顶式管道疏通方式,机器人前端的软抓手能够将堵塞物彻底清除。
三、产业化信息
1.应用场景
(1)现有版本的机器人可以用于家用下水管道疏通;
(2)机器人进一步结合先进传感技术,可以用于水下复杂狭小空间的环境检测。
2.商业价值
此项技术拥有巨大的商业前景,对于机器人行业有以下市场价值:
(1)本气动柔性管道机器人驱动方式简单,摆脱了传统刚性机器人笨重的电机,且本体由硅胶材料制成,成本低廉;
(2)本柔性管道机器人前端软抓手能够将堵塞物从管道中取出,防止管道二次堵塞,疏通效果远远好于原有前顶式疏通方式;
(3)本机器人能够解决家用下水管道日常堵塞这一常见问题,受众群体广泛,具有较大的市场;
(4)本柔性机器人有望与先进传感技术结合,进一步开发能够应用于多场景的狭小空间作业柔性机器人。
3.发展规划
(1)本项目可以与机器人公司合作,开发新一代基于柔性材料的管道机器人;
(2)本机器人融合先进智能传感技术,可以应用于其他狭小空间可的特定作业,应用场景从管道内拓展至更为广阔的其他场景。
4.合作方式
面议
注:所有专利信息未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn
