任政儒及其合作者在锚泊结构物定位反演研究领域取得新进展
锚泊是海上作业过程中固定水面浮式结构物的重要手段。通过锚链将水面浮式结构物和固定在海底的锚相连,从而为水面结构物提供回复力,以抵消水面风浪流载荷的漂移作用,将水面结构物稳定在一定合理范围内。随着传感器技术的进步,锚链张力可以通过传感器测量,用于监测锚链断裂等失效形式,从而提升海洋作业安全性。![]()
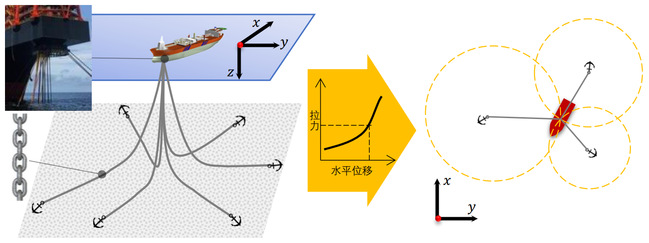
图1 通过锚链张力反演平面定位原理图
清华大学深圳国际研究生院海洋工程研究院任政儒助理教授及其合作者提出一种反向思维的应用方式,借助锚链张力实现水面结构物和海底锚链同步定位。该方法受机器人学中的同步定位与地图构建方法启发,结合历史位姿、历史锚链张力和实时锚链张力数据,实现在卫星失效情境下的二维位置定位反演,增强了锚泊结构的定位方法冗余度。
该方法的基本原理为通过悬链线方程离线计算出锚链张力和水平投影的映射关系,进而利用采集到的张力数据反演锚与导缆孔间的缆绳水平投影距离。本文通过数值模拟的方法,综合考虑到上端浮式结构物在海洋动力环境作用下产生晃动,锚链受到海流作用下的张力与计算值存在偏移,内(外)转塔的转动效应及导缆孔的集合分布等多方面因素对反演映射的影响,提出了复杂环境下的缆绳张力与锚-塔间水平投影距离的line of sight等效模型。
假设在一段相对较短时间内,海洋动力环境是稳定的,并且浮式结构物可以稳定在一个平衡点附近。研究人员通过采集若干段不同时间的数据(包括位姿信息和缆绳张力),可获得一些列的位置已知的虚拟船和距离信息,通过将虚拟船、未知位置的锚和实时船可进一步构建传感器网络用于定位。为验证该传感器网络的可观性,研究人员应用拓补几何的方法分析了虚拟船数量、锚链数量及锚分布对系统可观测性的影响。
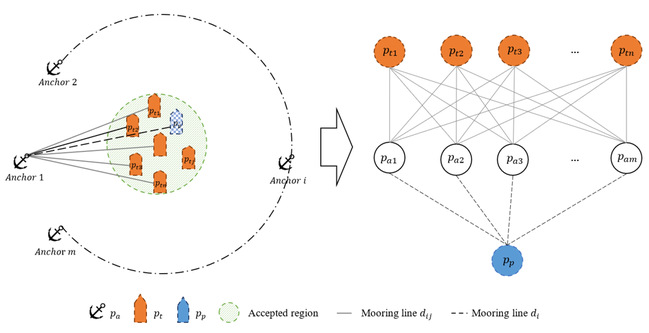
图2 锚泊结构物转换为距离定位传感网络

图3 转塔中心及锚的定位效果
相关研究成果以“通过锚链张力定位锚泊浮式结构物的方法与拓补可观性分析”(Localization and topological observability analysis of a moored floating structure using mooring line tension measurements)为题发表在国际期刊《海洋工程》(Ocean Engineering)上。本文第一作者为清华大学深圳国际研究生院任政儒助理教授,通讯作者为大连理工大学施伟副教授。其他合作者包括密歇根大学安娜堡分校博士生周宏宇,清华大学深圳国际研究生院胡振中副教授、李彬彬副教授,江苏科技大学俞孟红教授。
论文链接:https://www.sciencedirect.com/science/article/pii/S0029801822019898?dgcid=author
文:任政儒
编辑:彭锦涛
