海洋原位观测微颗粒流速仪研制(863重大项目)
清华大学海洋技术中心
●项目背景
海底原位观测是把仪器系统长期放置在海洋中,在无人维护情况下高速实时地获取海底观测数据。研制海底原位观测仪器既是我国海洋开发战略的需求,也是我国在国际前沿开展创新研究,占领高端仪器的国际市场的迫切需要。它具有很强的行业导向性,是一项很重要的基础技术研究。
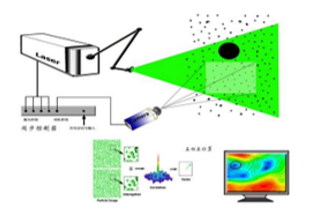
PIV系统的组成及工作原理
●研究内容:
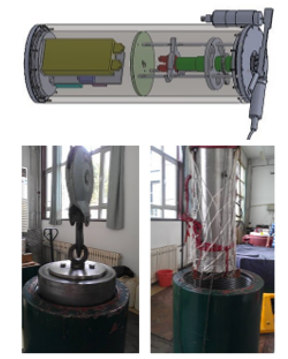
仪器三维示意图及其水密试验照片
本项目研制的海底原位观测微颗粒流速仪基于PIV(Particle Image Velocity)原理。其通过搭配高清高速摄像机和莱卡显微镜头实现最小微秒级拍摄;拍摄得到的视频通过高速Camera Link接口传输至在线处理系统中,并运用最前沿的DSP+FPGA开发技术对拍摄得到的原始图像信号进行在线实时处理,仅保留测试需要的微颗粒坐标、尺寸等信息,大大减少图像数据量,在海底观测网有限带宽下实现实时传输;最后岸基工作站提取传输上来的数据,处理获取深海湍流速度,泥沙和藻颗粒的粒径、浓度、物质通量等数据,并实现初步的藻分类。
●主要作用:
项目致力于提供速度观测的精度和增加物质通量参数,其研究成果有助于加深对海洋中复杂物质传输过程的理解,促进我国海洋观测仪器的快速推进,为我国海洋科技提供观测手段,从而提高深海海洋动力环境监测的技术水平,加深对海洋动力学、化学、生物学和生态过程的认识和理解,提高全球气候变化,碳循环,生态平衡等重要相关学科的科学研究水平。
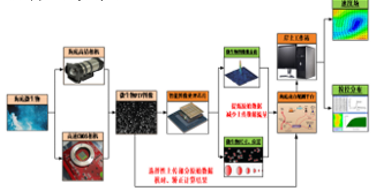
海洋原位观测微颗粒流速仪数据信息处理流程
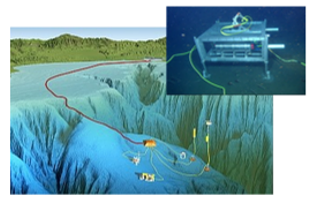
海底布放示意图
